Next: Extensions à des cadres Up: Calcul des variations Previous: Calcul des variations, équations
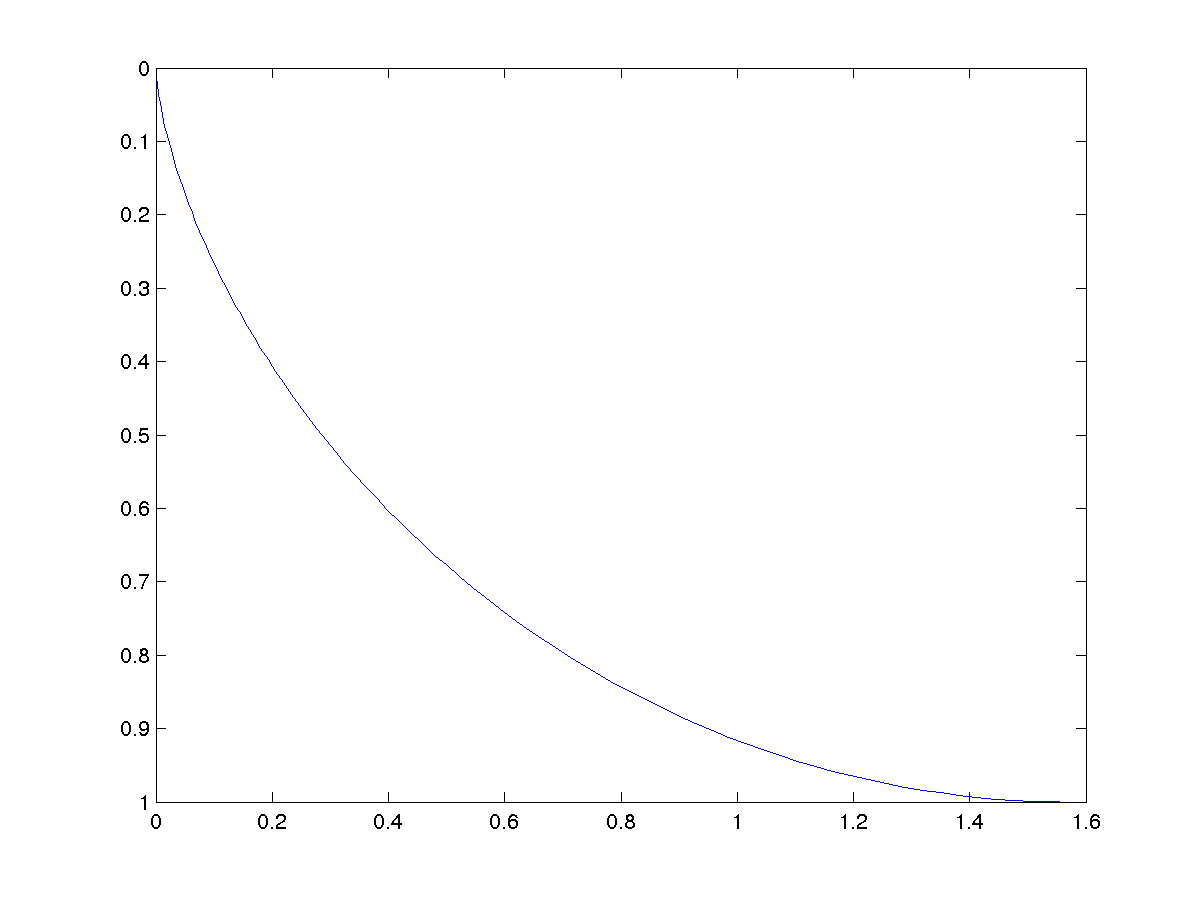
![\includegraphics[width=6cm]{figures/brachistochrone}](img119.png)
|
On note ![]() la variable horizontale, qui sera notre variable
indépendante, et
la variable horizontale, qui sera notre variable
indépendante, et ![]() la variable verticale (dépendante),
orientée vers le bas. On choisit le système de coordonnées de sorte
que
la variable verticale (dépendante),
orientée vers le bas. On choisit le système de coordonnées de sorte
que ![]() soit placé à l'origine des abscisses et des côtes.
L'énergie cinétique et l'énergie potentielle valent respectivement
soit placé à l'origine des abscisses et des côtes.
L'énergie cinétique et l'énergie potentielle valent respectivement
La conservation de l'énergie totale implique que
de sorte que la vitesse varie avec l'altitude comme
Le temps total nécessaire pour le trajet
![$\displaystyle \Phi[z] = \int_{x_1}^{x_2} \frac{ds(x)}{v(z(x))} =
\frac1{\sqrt{2g}}
\int_{x_1}^{x_2} \frac{\sqrt{1+z'(x)^2}}{\sqrt{z(x)}}\, dx
$](img128.png)
On est bien dans le cas de l'équation de Beltrami (pas de dépendance explicite de
Quelques manipulations donnent
d'où, en posant
Remarquons que
Pour exprimer ![]() en fonction de
en fonction de ![]() , calculons
, calculons
![$\displaystyle \frac{dx}{d\phi} =\frac{dx}{dz}\frac{dz}{d\phi} = 2k\sin^2\phi
= k[1-\cos(2\phi)]\ .
$](img138.png)
Ainsi, on en déduit (puisque pour
d'où on tire une forme paramétrique de la solution
 |
(1.8) |
puis en insérant dans l'équation de

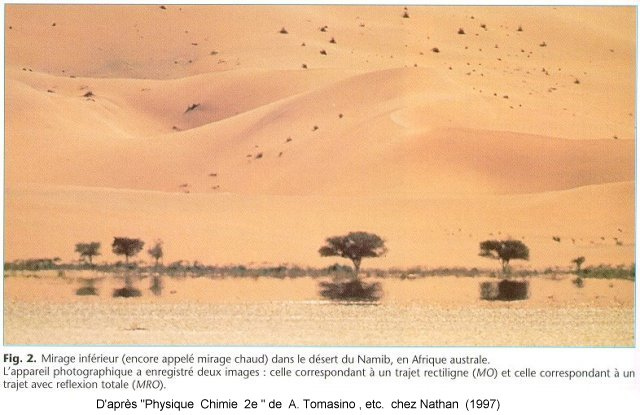
La valeur numérique de
![[*]](crossref.png) et FIG.
et FIG.
|
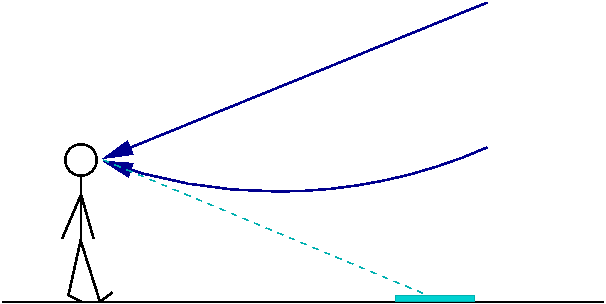
Le temps de trajet dépend du chemin choisi; en prenant ![]() ,
ou alternativement
,
ou alternativement ![]() , on obtient pour le temps de trajet de
la lumière entre deux points l'expression suivante
, on obtient pour le temps de trajet de
la lumière entre deux points l'expression suivante

On privilégie
c'est à dire
Pour aller plus loin, il est temps de faire un choix pour la variation de l'indice en fonction de l'altitude. Supposons une dépendance linéaire. Le choix particulier
en posant

et finalement, une simple intégration donne

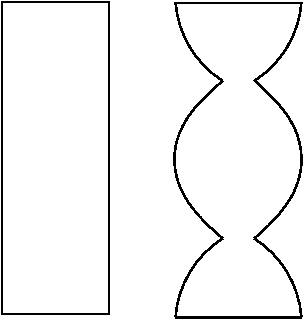
Il s'agit d'une chaînette, ou caténoïde, que l'on peut approximer par une parabole au second ordre, autour de
Un exemple célèbre est donné par un problème étudié par Lagrange en 1783 (initialement formulé par Euler en 1744 puis Bernoulli): trouver la forme optimale d'une colonne de hauteur et volume fixés, pouvant supporter une pression maximale au sommet. Lagrange a eu le grand mérite de donner une formulation mathématique précise au problème, mais la solution qu'il proposa, et qui le conduit à une colonne cylindrique, était entâchée d'un certain nombre d'erreur, en particulier une hypothèse de différentiabilité de la solution. Il a en fait fallu attendre 1992 (après plusieurs tentatives, chacune marquée par des erreurs dues à des hypothèses inadaptées) pour que Cox et Overton aboutissent à une solution rigoureuse à ce problème, qui s'est ainsi avéré bien plus difficile qu'il n'y paraissait.
|
Bruno Torresani 2007-06-26